




Sementara robot humanoid menjadi umum di dunia saat ini, anjing robot berkaki empat mengambil alih sektor operasional untuk berbagai bisnis di seluruh dunia. Menyaksikan permintaan ini, kami telah melihat beberapa perusahaan seperti Boston Dynamics dan Xiaomi menghadirkan anjing robot canggih yang dapat melakukan tugas berat dengan mudah. Sekarang, peneliti ETH Zurich telah berkolaborasi dengan pembuat GPU populer Nvidia untuk mengembangkan algoritme canggih – untuk membantu melatih anjing robot dunia nyata untuk berjalan dan berlari di medan yang stabil dan tidak stabil.
Para peneliti dari ETH Zurich di Swiss telah bermitra dengan Nvidia untuk membuat rintangan bagi pasukan robot anjing virtual. Simulasi virtual digunakan untuk melatih robot berkaki empat di dunia nyata untuk berjalan di medan yang kompleks seperti lereng, tangga, dan turunan curam.
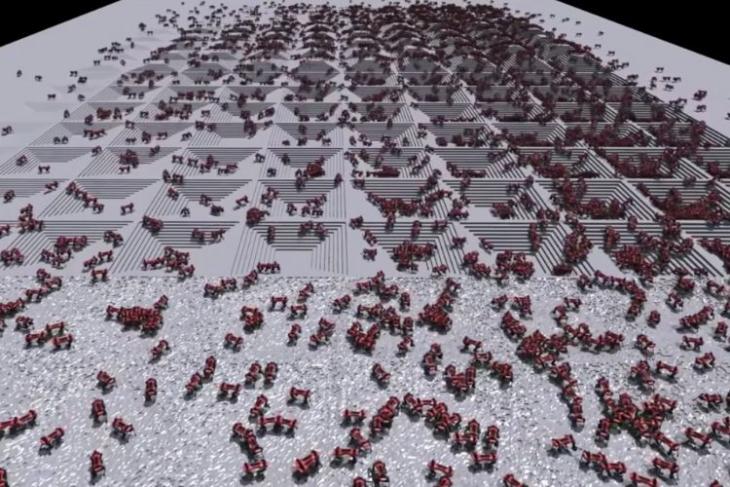
Mesin berkaki empat, dalam simulasi, disebut sebagai “ANYmals” dan terlihat seperti ribuan semut yang menggeliat tanpa tujuan di lapangan virtual. Para peneliti menggunakan 4.000 robot virtual untuk membuat simulasi yang dapat Anda lihat di bawah ini.
Simulasi yang dibuat untuk melatih robot berjalan pada chipset berbasis AI khusus yang dirancang oleh Nvidia. Sebagai hasil dari chip canggih ini, para peneliti mengatakan mereka dapat melatih robot dalam waktu kurang dari seperseratus waktu yang umumnya diperlukan untuk melatih mereka menggunakan chip tujuan umum yang digunakan di komputer dan server.
Sekarang, meskipun chip khusus Nvidia cukup bagus dalam menghitung rendering grafis dan menjalankan jaringan saraf, chip tersebut tidak terlalu bagus dalam mensimulasikan properti berbasis fisika seperti memanjat dan meluncur. Namun, para peneliti datang dengan beberapa solusi berbasis perangkat lunak pintar “untuk melakukannya dengan benar”, sesuai dengan Nvidia VP of Simulation Technology Rev Lebaredian.
Setelah pembuatan simulasi kompleks menggunakan pembelajaran penguatan paralel yang sangat besar, para peneliti menggunakannya untuk melatih kaki robot dunia nyata. Ini memungkinkan robot untuk belajar berjalan di lereng, tangga, dan medan kompleks lainnya dalam hitungan menit. Selain itu, setiap kali robot anjing belajar mengatasi medan yang menantang, para peneliti memberikan tantangan medan yang lebih sulit untuk membuat algoritme kontrol lebih maju.
Jadi, para peneliti ETH dan Nvidia berpikir bahwa simulasi “ANYmals” dapat menjadi alat yang hebat untuk melatih anjing robot dunia nyata dalam waktu yang lebih singkat menggunakan pembelajaran penguatan. Anda dapat melihat makalah penelitian resmi tentangnya melalui tautan yang sesuai untuk mengetahui lebih banyak tentang algoritme kompleks dan rintangan virtual.


{kind=link}